双目摄像头标定——相机标定(Camera calibration)推导过程
”双目相机标定 三维坐标“ 的搜索结果
c++程序,vs2017上运行,可以由双目相机拍得的照片任意一点求取该点的三维坐标,误差在1%左右。
在“Camera-centric”中查看相机与图片的空间位置是否与你实际拍摄时候的位置差不多,因为当误差太大的时候,这里的左相机、右相机、图片三者之间的位置关系真的很离谱!镜头的畸变从图像中心径向增加,并且有时在...



根据官方例程进行改变。进行三角测量的两种方法进行三维坐标计算,非全图三维重建,是特征点,这里使用的是棋盘格角点作为匹配点
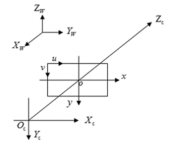
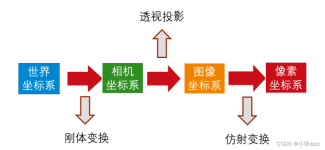
计算机视觉方向,单目/双目相机的详细标定原理以及图解,双目测距、三维重建 (世界坐标系到像素坐标系的转换,单目相机内外参数畸变系数的求解,单应性矩阵,双目标定,立体标定,立体校正,立体匹配,视差计算等)



摄像机矩阵由内参矩阵跟外参矩阵构成,具体得到可以通过MATLAB工具箱标定得到,到处都是博客,在此就略过了。在Opencv中的话,可以通过cv2.solve(A,B,cv2.DECOMP_SVD)求解。当图片进行校正后,就可以进行坐标计算了...
而得到物体的三维信息。计算机双目视觉直接模拟了人眼处理景物的方式,可在 多种条件下灵活地测量景物的立体信息,是其它计算机视觉方法所不能取代的, 对它的研究,无论是从视觉生理的角度还是在工程应用中都具有...
基于C++实现的双目摄像头三维重建源码(相机标定+矫正+获取点云坐标+体积估计)+超详细注释.zip 基于C++实现的双目摄像头三维重建源码(相机标定+矫正+获取点云坐标+体积估计)+超详细注释.zip 基于C++实现的双目摄像头...

基于opencv+matlab+C++开发的双目视觉测量+相机标定+立体校正+三维坐标重载+计算工件变形量,适合毕业设计、课程设计、项目开发。项目源码已经过严格测试,可以放心参考并在此基础上延申使用~ 基于opencv+matlab+...
用C写的,但是其坐标输出有C和C++两个,鼠标点击输出三维坐标,其相机标定用的是MATLAB结果导入,用的VS2010,实际运行成功的,不出我需要修改的是相机标定的xml文件,标定过程参考前面的博文,还有就是修改左右相机...
YOLOV5 + 双目相机实现三维测距(新版本)
双目相机-三维坐标

并利用立体视觉原理计算目标相对左右相机的**空间三维坐标以及空间距离**。 圆点靶标相对于棋盘格靶标来说,具有一定的局限性,同时又有其独特的优势。 优点:在针对一些诸如投影仪和相机的标定过程中,需要知道...
基于C++实现的双目摄像头三维重建源码(相机标定+矫 双目标定测定距离流程 获取左右相机内外参数 相机内参:(1/dx, 1/dy, Cx, Cy, f)表征了相机的内部结构参数 dx和dy是相机单个感光单元芯片的长度和宽度,是一个物理...
简介:该项目基于YOLO目标检测算法与双目相机模拟,实现目标的检测与三维坐标展示。双目相机需要根据实际双目相机进行标定(这里只展示逻辑,标定工作因相机制宜)。支持测量得到距离目标的距离,并且得到目标的三维...

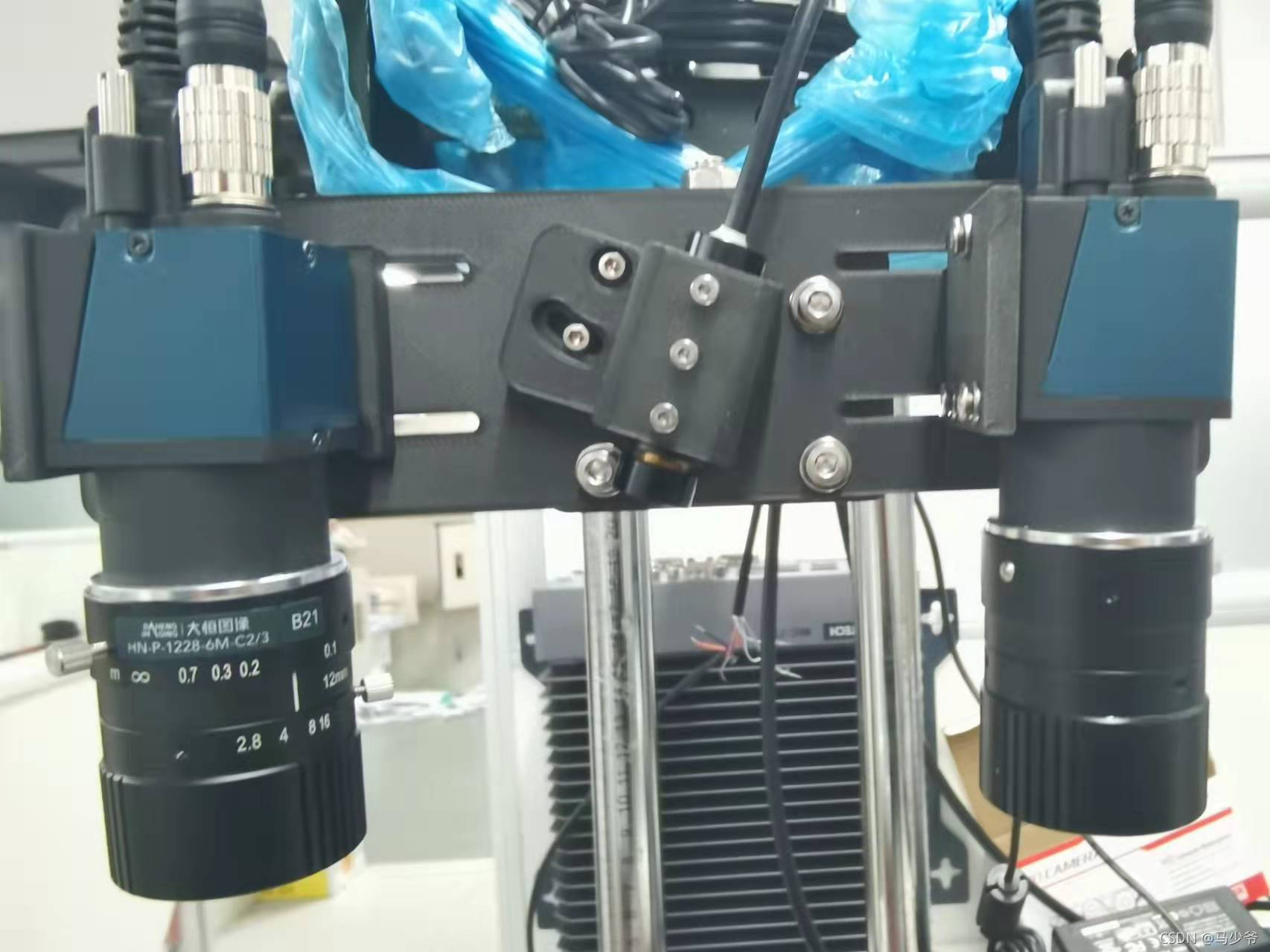
当然,也想着能否用它做一些好玩的,比如三维重建之类高大上的东西。先用便宜的入个门,等以后眼界高了再看是不是买那些更加精密的双目。不过目前来看,这个摄像头还是很不错的。这个双目摄像头用win10自带的摄像头...
推荐文章
- PYTHON常用库简介_python常用库介绍-程序员宅基地
- Anaconda创建Pytorch虚拟环境(排坑详细)_anaconda创建pytorch环境-程序员宅基地
- Linux: 磁盘状态观察命令lsblk、blkid-程序员宅基地
- 构造方法与方法的区别详解_构造方法和普通方法之间的区别-程序员宅基地
- 高维数据惩罚回归方法:主成分回归PCR、岭回归、lasso、弹性网络elastic net分析基因数据...-程序员宅基地
- 中科数安 | 防泄密软件-程序员宅基地
- JavaScript——leetcode剑指 Offer 36. 二叉搜索树与双向链表_leetcode 链表的head是什么js-程序员宅基地
- 一篇文章让你全面了解TDengine-程序员宅基地
- 成为JavaGC专家Part II:如何监控Java垃圾回收机制-程序员宅基地
- python学习导航线_python点线导航-程序员宅基地